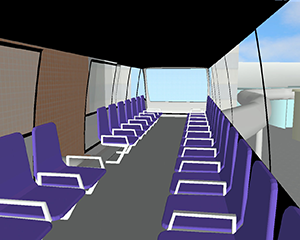
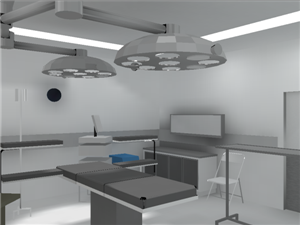
This project aims to test the usage of virtual
enviroments for medical training and education. We are
developping a virtual surgical center where the student will be able to
navigate and interact with the nursery and the patient.
|
|
The area of Medical Qualification in Life Support
training is being constantly improved. However, many problems are
identified in the training process, such as the lack of realism in the
exercises and the low student involvement. In order to qualify the
learning process, the ARLIST project (Augmented Reality for Life
Support Training) is being developed to add computational resources as
sound and images, in the manikins used in the training courses. Through
Augmented Reality techniques, the use of OpenGL and some computational
resources (e.g. projector ad video camera), it is possible to build an
application that defines the images and sounds that should appear in
accordance to the clinical state of the patient.
Related Papers:
Pretto, Fabrício ; MANSSOUR, Isabel Harb ; PINHO,
Márcio Sarroglia . Augmented Reality for Life Support Training.
In: SIBGRAPI - Simpósio Brasileiro de Computação
Gráfica e Processamento de Imagens, 2007, Belo Horizonte. To
appear, 2007. (PDF) |
|
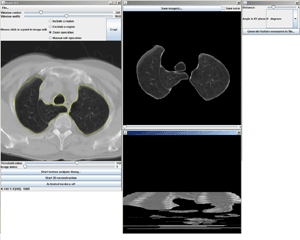
This project is developping a system
to identify interstitial lung tumors using texture analysis.
|
 |
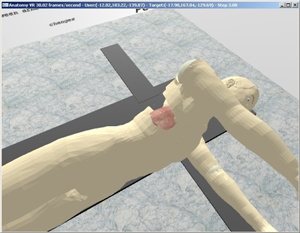
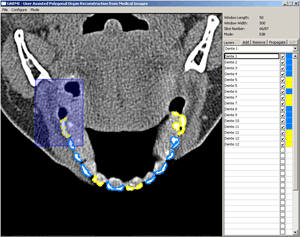
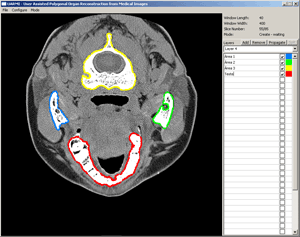
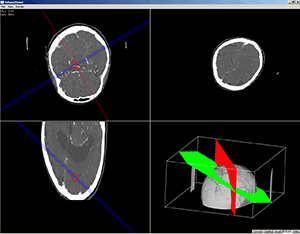
This software aims at making possible a
three-dimensional reconstruction of human body structures, segmented
from medical images (called slices). To this day, it is possible to do
automatic and manual segmentation from DICOM images and generates as
output a 3D file. This file can be loaded in CAD (Computer Aided
Design) systems that are able to create the three-dimensional models
from plane sections.
See
more details here.
|
|
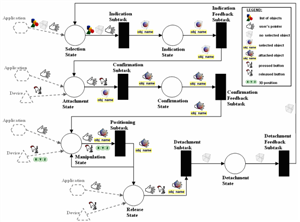
This work presents a methodology to model and to build
3D interaction tasks in virtual environments using Petri nets,
technique-decomposition taxonomy and object-oriented concepts.
Therefore, a set of classes and a graphics library are required to
build an application and to control the net dataflow. Operations can be
developed and represented as Petri Net nodes. These nodes, when linked,
represent the interaction process stages. The integration of these
approaches results in a modular application, based in the Petri Nets
formalism that allows specifying an interaction task, and also to reuse
developed blocks in new virtual environments projects.
See more
details here.
Related Papers:
RIEDER, R., RAPOSO, A.B., PINHO, M.S. Uma Metodologia
Para Especificar Interação 3D utilizando Redes de Petri.
Proceedings of the IX Symposium on Virtual and Augmented Reality.
Petrópolis, RJ: LNCC, 2007. (PDF)
|
 |
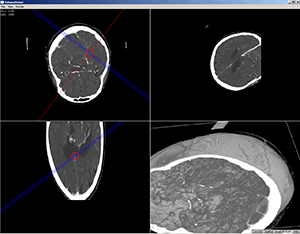
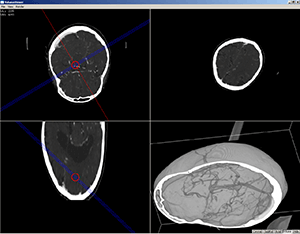
This project has developed a viewer for medical images.
It displays images on 2D and 3D.
|
 |
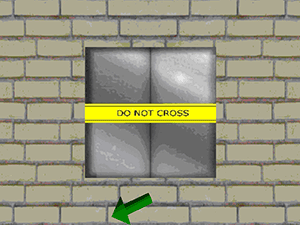
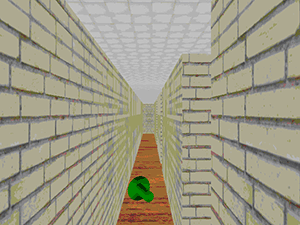
Interaction in virtual environments is an area of study
that has been developing in a remarkable way in recent years. As we can
see on a literature review, the interaction can be divided in control,
selection, manipulation and navigation. This last one can be divided in
traveling and wayfinding. The travel task is defined as the movement
and orientation of the user, and wayfinding is related to the
information presented by the environment with the objective to support
the user in his localization. This work deals with the evaluation of
wayfinding aid techniques in virtual environments that allow users to
navigate with high degree of freedom for traveling. The evaluation was
made through the development of applications that implement some of the
existing techniques and tests with groups of users, where each group
tested one of the chosen techniques. The test results have shown that
it is useful to use such techniques in this type of environment.
Related Papers:
BACIM, Felipe; TROMBETTA, André Benvenuti; PINHO,
Márcio Serolli. Avaliação de Técnicas de
Auxílio a Wayfinding em Ambientes Virtuais. In: IX Symposium on
Virtual and Augmented Reality, 2007, Petrópolis, RJ. IX
Symposium on Virtual and Augmented Reality, 2007. (PDF) |
 |
This work consists of the study of techniques of
robotics and Virtual Reality (RV) to develop a simulator that can be
used in the robotics schools, having an adequate visualization and a
simple and intuitive way of interaction. For this a Virtual Environment
(AV) for robotics was developed, in language C++, using OpenGL.We
simulate the Scorbot ER-VII robot. RV resources have been
incorporated to improve the visualization and to facilitate the
interaction of the user with the program. The evaluation of the
environment was performed through the analysis of the results obtained
in the experiments carried out with users. Automatic reports for the
quantitative questions were generated, and questionnaires were
fulfilled for the qualitative questions. The results have shown that
the use of RV helps in the execution of the task, improving the
visualization by reducing the total time and increasing the precision.
See more details here |
 |
The design of virtual environments for applications that
have several vlevels of scale has not been deeply addressed. In
particular, navigation in such environments is a significant problem.
This paper describes the design and evaluation of two navigation
techniques for multiscale virtual environments (MSVEs). Issues such as
spatial orientation and understanding were addressed in the design
process of the navigation techniques. The evaluation of the techniques
was done with two experimental and two control groups. The results show
that the techniques we designed were significantly better than the
control conditions with respect to the time for task completion and
accuracy.
See more
details here
Related Papers:
KOPPER, Regis; NI, Tao; BOWMAN, Doug; PINHO, Marcio
Serolli. Design and Evaluation of Navigation Techniques for Multiscale
Virtual Environments. In: IEEE VIRTUAL REALITY 2006, 2006,
Alexandria.IEEE Virtual Reality. IEEE Computer Society, 2006. p. 24-31. |
 |
The SmallVR toolkit supports virtual reality
applications construction.
The main goal were to develop a toolkit that allows the rapid
development of virtual reality applications and to facilitate the port
of existing computer graphics applications to a virtual reality setup.
The toolkit supports the following issues: construction of scene graph,
view-culling techniques, geometric model loading, collision detection
and multiple screen rendering. The toolkit modeling uses an object
oriented language to facilitate the modification and upgrade tasks. The
SmallVR was built on the top of OpenGL and GLUT libraries.
See more details
here. |
|
Currently, the use of Virtual Reality technology has
opened the possibility to use computers
with an interaction level superior to the traditional interfaces based
on keyboards and mouse.
This is achieved trough devices that allow to insert the users vitually
in a computer generated
environment. In this virtual environment the user can visualize and
manipulate, in three dimensions, virtual objects that are part of it,
with the possibility of interacting with them in a similar
way like the real world. The degree of interaction in virtual
environments is influenced by the capability of track certain parts of
body, such as the head, the hand or even the whole body. Also, it
is important that this environment enable the execution of certain
operations that allow a user interact with a virtual object in real
world fashion, providing the feeling that he or she is immersed
in another reality. Unfortunately, the cost of such equipments and the
amount of wires that need
to be attached to the user body, among others restrictions, limit the
use of Virtual Reality in
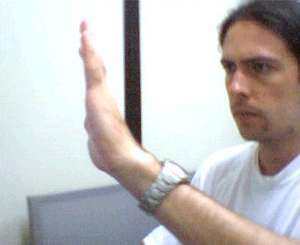
everyday life. This work aims to present an alternative to the position
and orientation tracker
hardware used to track the user hand. Its contribution is to use Image
Processing and Computer
Vision techniques to implement a video image based hand tracker. To do
so, the project is divided in three distinct phases. The first phase
detects the hand in an image through skin color
segmentation. In this phase, four skin segmentation algorithms are implement and many tests
are realized with two skin models and two color space. The second phase
calculates the hand
position and two algorithms are implemented and tested. In the third
phase, the hand orientation
is obtained through a Computer Vision technique called Image Moments.
After that, through the
contour hand analysis, some features are detected, such as fingertips,
valleys between the fingers
and the wrist. These features can be used to get the 3D hand position
and orientation. Along
this text each development phase, the techniques used, and its
respective results are described in
detail.
See more details
here
|
 |
SharedMemoryLib,
a C library that provides an easy way to build a common memory page to
be shared between different process/programs.
See more
details here |
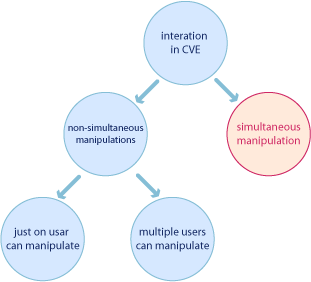
Cooperative manipulation refers to the simultaneous
manipulation of a virtual object by multiple users in an immersive
virtual environment (VE). In this work, we present techniques for
cooperative manipulation based on existing single-user techniques. We
discuss methods of combining simultaneous user actions, based on the
separation of degrees of freedom between two users, and the awareness
tools used to provide the necessary knowledge of the partner activities
during the cooperative interaction process. We also present a framework
for supporting the development of cooperative manipulation techniques,
which are based on rules for combining single user interaction
techniques. Finally, we report an evaluation of cooperative
manipulation scenarios, the results indicating that, in certain
situations, cooperative manipulation is more efficient and usable than
single-user manipulation.
See more details here.
Related Papers:
Pinho, M. S.; Bowman, D. A.; Freitas, C. M. D. S. Cooperative Object
Manipulation in Immersive Virtual Environments: Framework and
Techniques In. ACM VIRTUAL REALITY SOFTWARE AND TECHNOLOGY, 2002, Hong
Kong, p. 171-178
|

 |
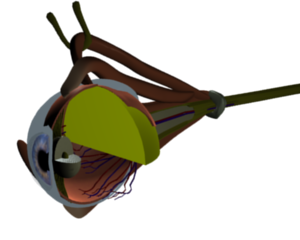
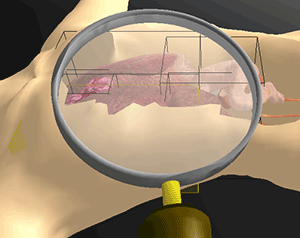
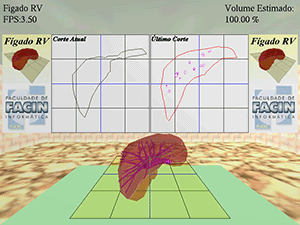
The main objective of this work is to help surgery
specialists in hepatectomy planning. This work proposes the development
of a Virtual Environment to help the planning of a hepatectomy surgery.
Some techniques of the modern medicine used to plan a hepatic surgery
are described, as well as the difficulties involved in the process. The
medical image acquisition methods and the generation of the virtual
model of a human liver techniques are briefly explained. Computer
graphics is presented as a useful tool to help medicine in areas such
as phobia treatments and teaching. The software will be developed using
computer graphics and virtual reality techniques combined, in order to
have an intuitive human-machine interface. It will show the virtual
liver, based on data from a real patient, as well as a cutting plane,
controlled by the user, helping to look for the adequate place to make
the section. The human-machine interface will be designed in a way the
surgeon does not need to be a computer expert.
See more detais here
|
 |
In this work, a set of tests has been developed in
order to evaluate
the effectiveness of the use of touch sensations in virtual environment
simple tasks. The work focused on the model of interaction defined by
Doug Bowman which subdivides the manipulation process in four distinct
phases: selection, attachment, positioning e release. This design
choice allows us to analyze the very specific characteristics present
on each phase of the interaction process and for each of them seek for
appropriate ways to improve the interactive experience. From this
analysis, the type of tactile stimuli that should be generated in each
stage was defined, always having the goal of improving the execution of
the task.
See more details here
Related Papers:
KOPPER, Régis Augusto Poli; SANTOS, Mauro Cesar Charão
dos; PROCHNOW, Daniel; PINHO, Marcio Serolli; LIMA, Julio Cesar.
Projeto e Desenvolvimento de dispositivos de geração de
tato. In: VII SYMPOSIUM ON VIRTUAL REALITY, 2004, São
Paulo. 2004. v. 0, p. 65-75. (PDF)
|


|
This projetc have built a system to support the use of
Augmented Reality in out-door enviroments.
See more details here. |
The “Remote Memory” is a library to support
shared distributed memory for Collaborative Applications.
See more details here |
This work presents the design and development of a
robot movement
system using virtual reality devices, as a glove and a
three-dimensional position tracker. By using these devices the user can
make, with his hand, the movements he wishes and the robot will repeat
them. The system captures the user’s movements and translates
them to
robot commands. The system implements also a three-dimensional
environment simulation environment where many programming tests can be
made. See more details here.
|
One of the most complicated tasks when working with three-dimensional
virtual worlds is the navigation process. Usually, this process
requires the use of buttons and key-sequences and the development of
interaction metaphors which frequently makes the interaction process
artificial and inefficient. In these environments, very simple tasks,
like look upward and downward can became extremely complicated. To
overcome these obstacles, this work presents an interaction model for
three-dimensional virtual worlds, based on the interpretation of the
natural gestures of a real user while he/she is walking in a real
world. This model is an example of a non-WIMP (Window, Icon, Menu,
Pointer) interface. To test this model we created a device named virtual-bike.
With this device, the user can navigate through the virtual environment
exactly as if he were riding a real bike.
(versão em
português)
See more details here
Related Papers:
PINHO, Marcio Serolli; DIAS, Leandro Luis; MOREIRA,
Carlos G. Antunes; KHODJAOGHLANIAN, Emmanuel González;
BECKER, Gustavo Pizzini; DUARTE, Lúcio Mauro. A User Interface
Model for Navigation in Virtual Environments. Cyberpsychology And
Behaviour Jornal, v. 5, n. 5, p. 443-449, 2002.
|
 |
This project is developing software libraries to allows
easier
creation of immersive applications. Now we finished the following
libraries:
DXF file Reader - Download here
Polhemus Isotrack II driver - Download here
|
These project is developing an interaction panel which
can be used inside an immersive environment. The user can manipulate a
tridimensional panel using a real panel and a real pointer (like a
pencil). |
A system to manipulate virtual objects. It is
possible to move and
rotate the objects. This system was our first work in virtual
realitty. It uses a Powerglove to grab and move the virtual objects. |
|