Remote Control for Unmanned Vehicle
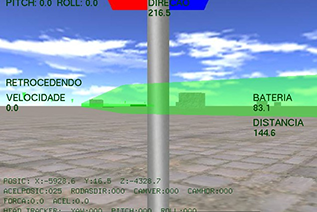
One of the problems faced in the remote operation of robotic vehicles is the low situational awareness that the vehicle operator has regarding the situation of the vehicle and the environment where the vehicle is, depending on the type of control station which uses to operate the vehicle and the resources it offers.
In this project we are developing a navigation system that increases situational awareness of the operator of the vehicle while easing your driving. The merging of technologies such as Virtual Reality, Augmented Reality and Immersive Tele-Presence can be used in implementing this system.